ECE3730J Final RC Part 1
L2 (Embedded system overview)
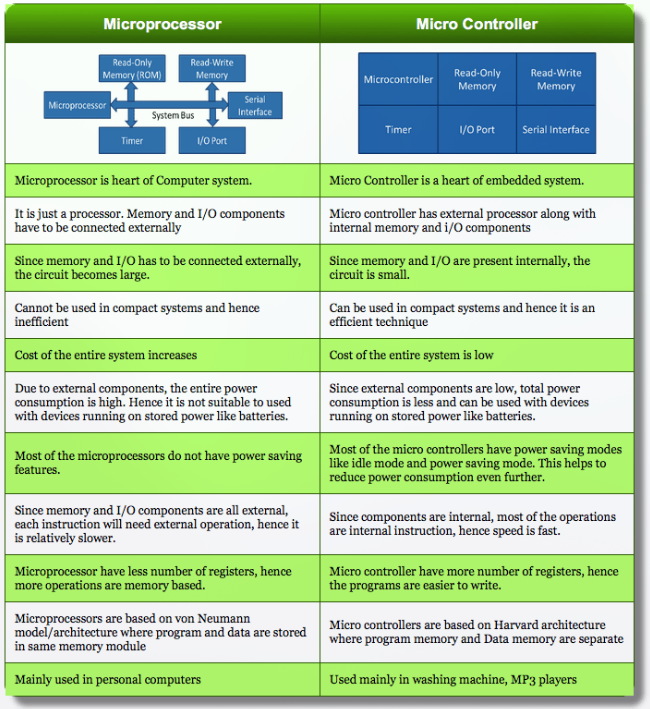
Take a look at the differences between Microprocessor (in our personal computer or phone) and Microcontroller
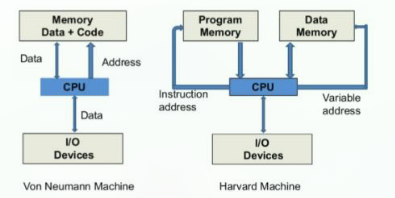
In embedded system, harvard architecture is widely used.
Our board (STM32F103C8T6) use harvard architecture on physical level (refer to the block diagram in reference manual)
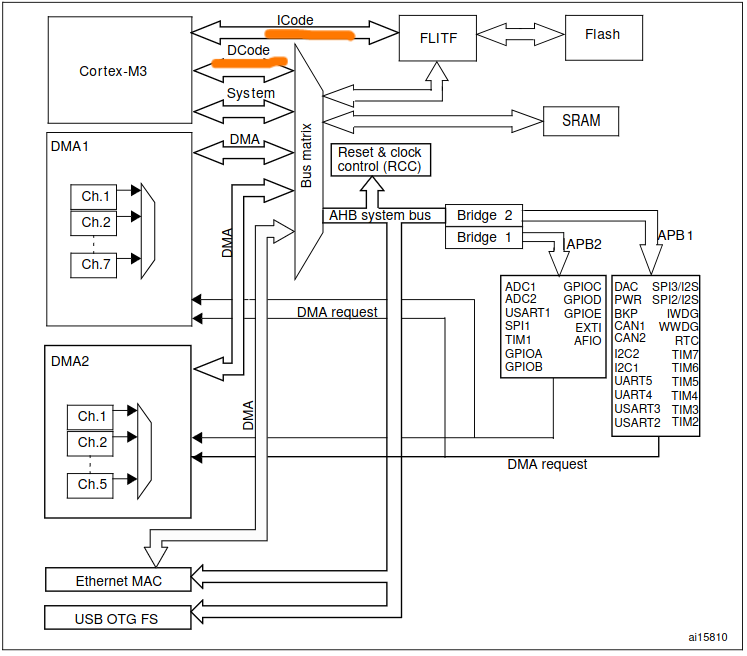
However, in the software level, we treat the instruction memory and data memory as a whole block of memory (therefore, it is more accurate to say that the stm32 uses a mixed Harvard and von Neumann architecture.).
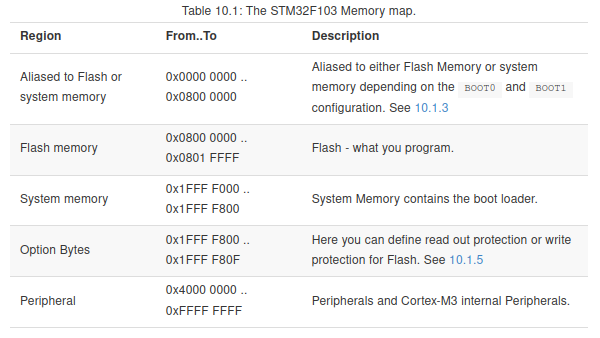
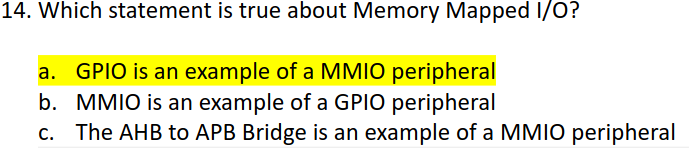
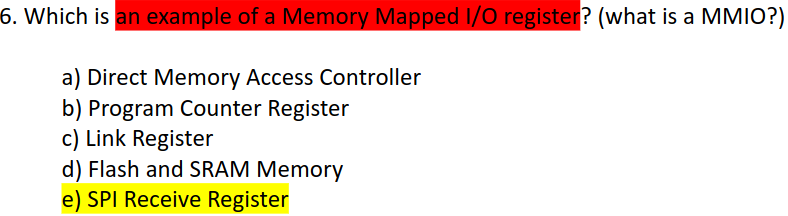
In stm32, instruction memory, data memory, registers of peripherals/IO are all mapped to memory.
L3 (Programming)
Type Qualifiers
const
- implies that value not supposed to be written by program (read only) during run-time. Can be modified by others like hardware.
If you want to save the limited RAM spaces (data memory) for other variables, you can use this keyword to store this variable in ROM (program memory). It’s important for harvard architecture.
volatile
- indicate the value can be changed by something other than program so it should be reexamined frequently.
This means two things:
- The compiler will not try to optimize the variable with
volatile. See the two examples on slides. - Each time the program reads the
volatilevariable, the processor will not look into cached data memory, meaning that the program can always get the newest updated data in memory (which is very important when external hardware change the variable).However, this case is not relevant with STM32 MCU since it didn’t have cache.
- The compiler will not try to optimize the variable with
What about const volatile ?
- The combination of the above two concepts. Usually used to declare pointers
Example:const volatile char *adeclares a pointer pointing to a value that cannot be changed by the program through*a, but the value of a can be changed (pointing to another value).*a = 0is not allowed,a = &bis allowed.
Generally, we use const volatile to declare pointers that points to hardware registers or memory-mapped Input ports(read only).
Basic Program Structure
1 | // import header file for the board (containing the declaration of SFR) |
How to interact with peripherals
We need to use C code to set the value of SFR.
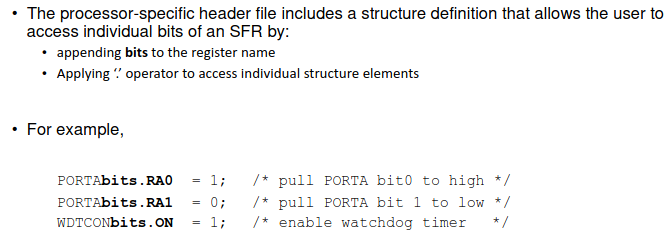
SFR (special function registers)
These are registers that are embedded in peripherals, used for configuration and control of peripherals.
VERBOSE~
If we want to get the status of a peripheral, we read the value of SFR.
If we want to send something to peripheral, we write value to SFR.
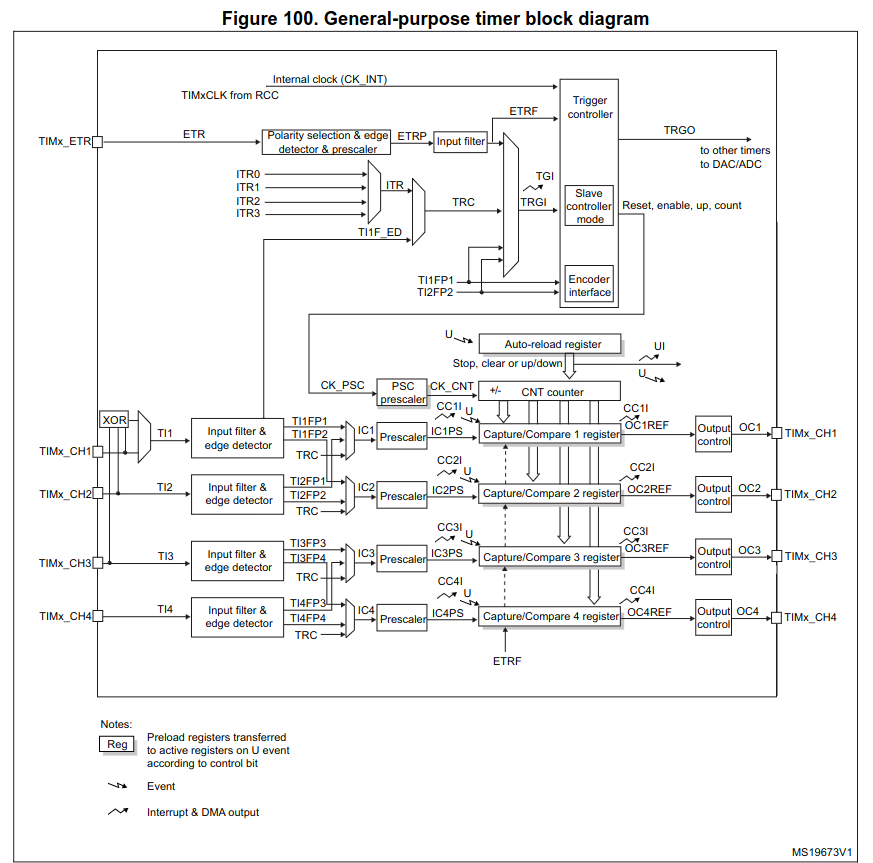
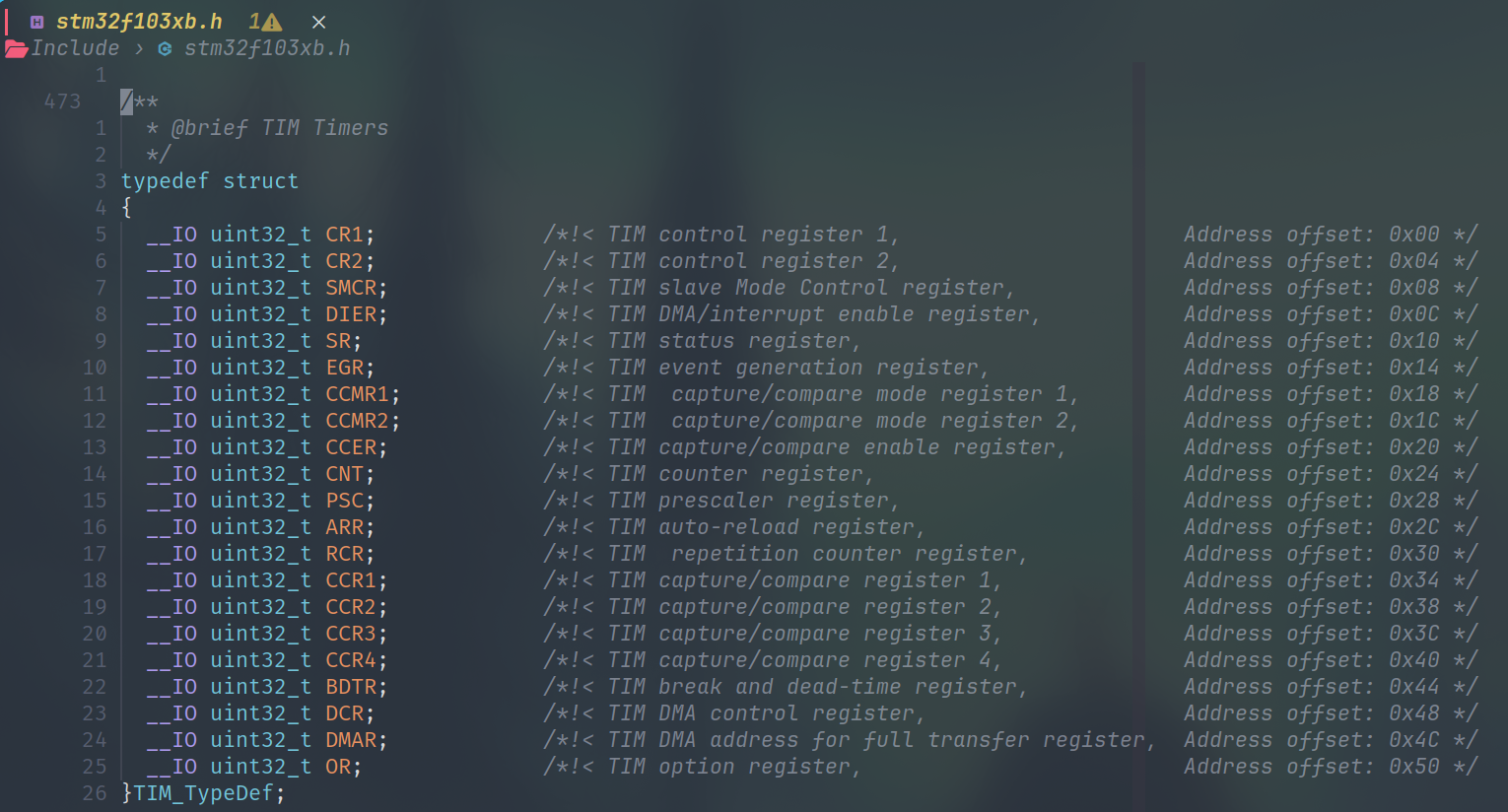
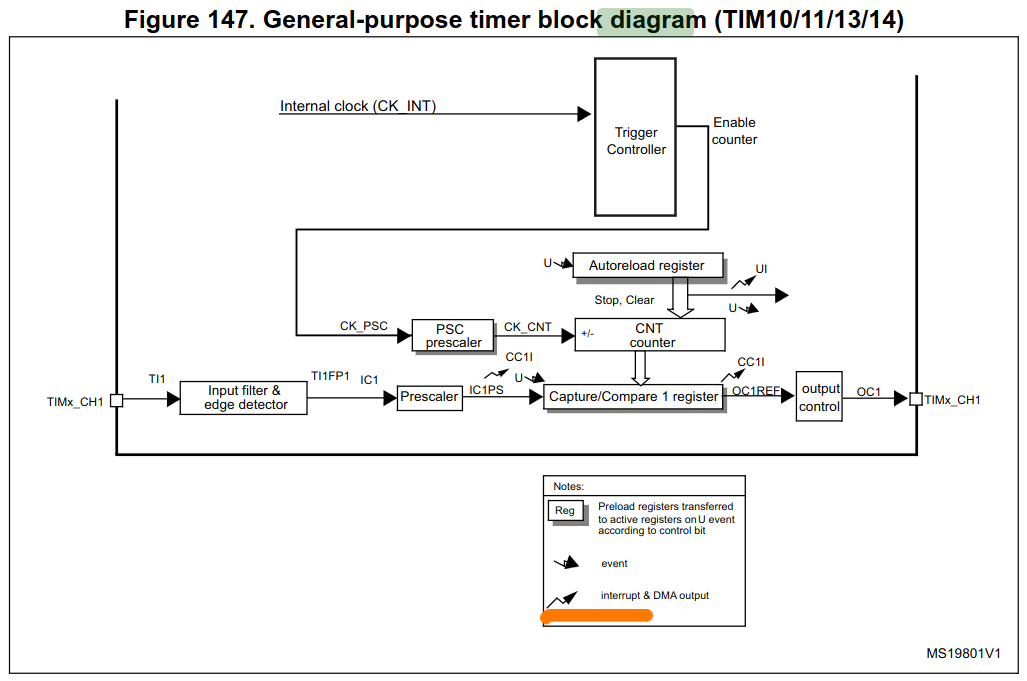
Let’s take timer as an example:
SFR in block diagram of timer:
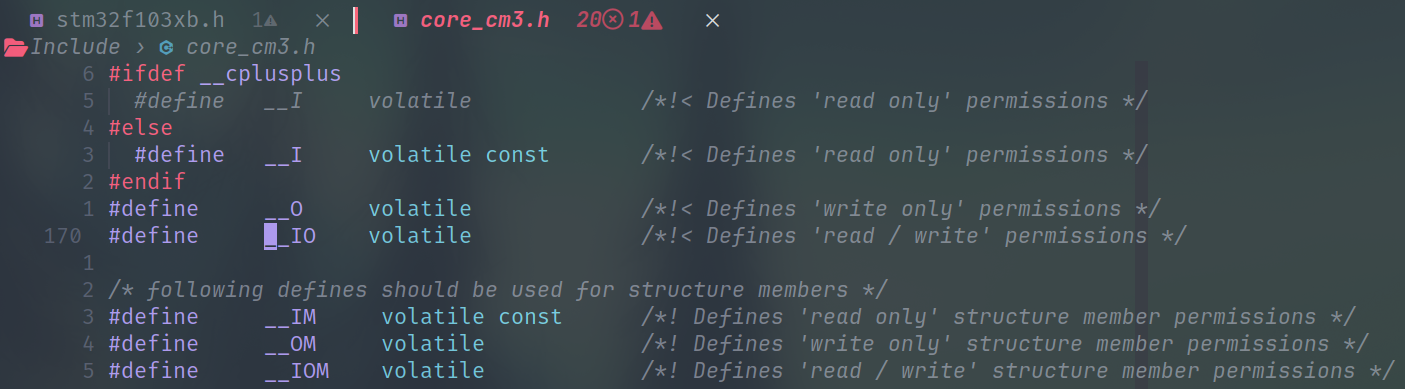
SFR declaration in code:
We change operate with these registers through Bit Operation.
L4 (IO)
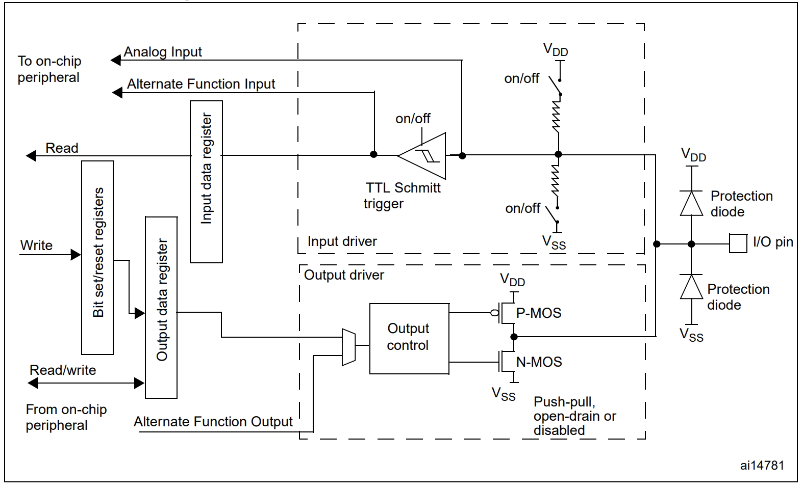
All the modes of GPIO:

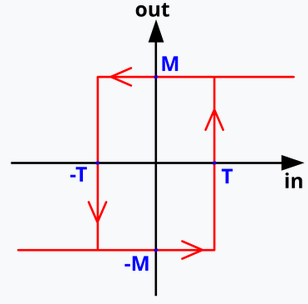
You may see an unfamiliar unit

It’s used to convert the input analog voltage to digital voltage.
You can memorize it through this graph:
Transfer function of a Schmitt trigger.
Input
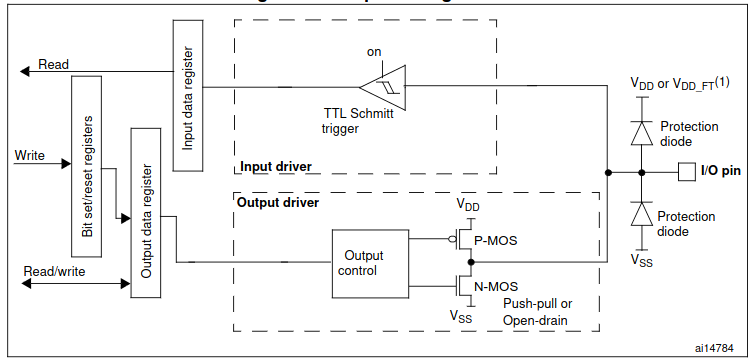
After we configured the GPIO to be input ports, the output driver is disabled (disconnected).
Pull down
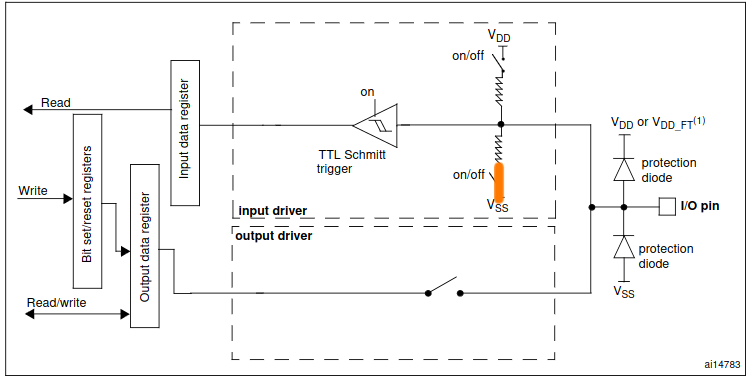
Pull up
Floating
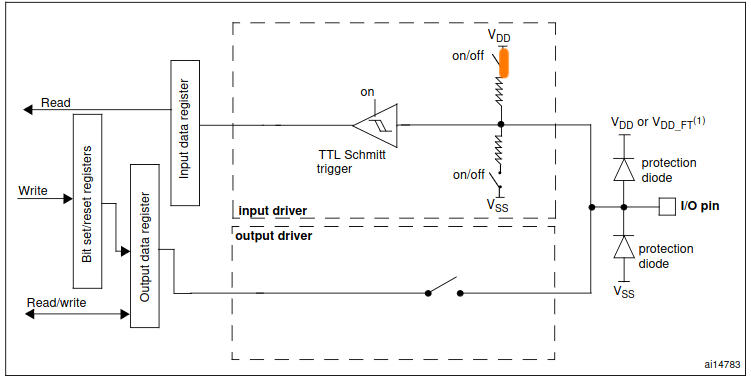
General Purpose Output
The input driver part is still enabled so that we can read the output status.
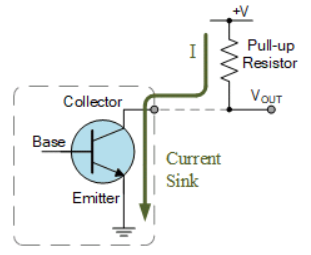
Open Drain
Can “generate” voltage higher than VDD at IO pin.
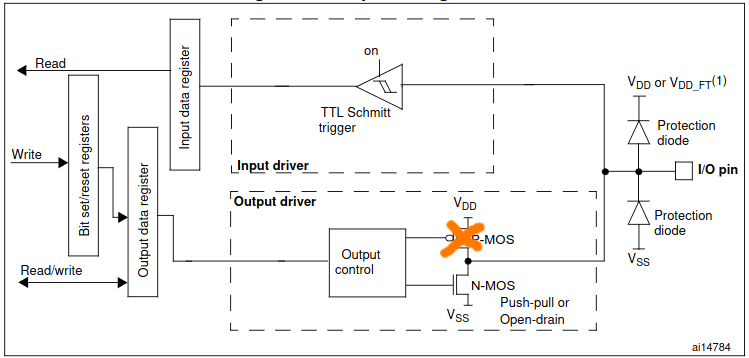
Push Pull
Most common one.
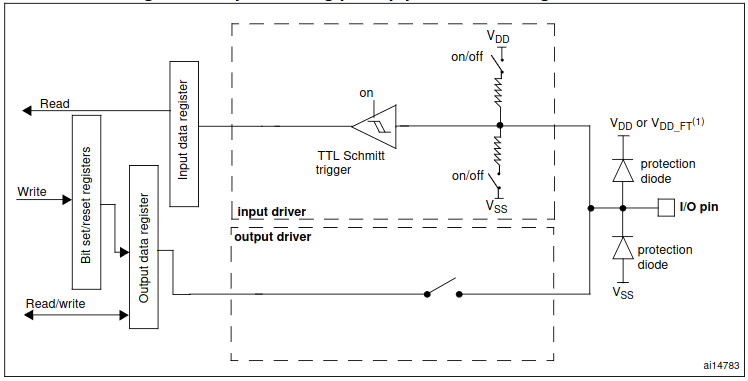
Alternative Function Output
Not covered.
L5 (Interrupts)
Why interrupt?
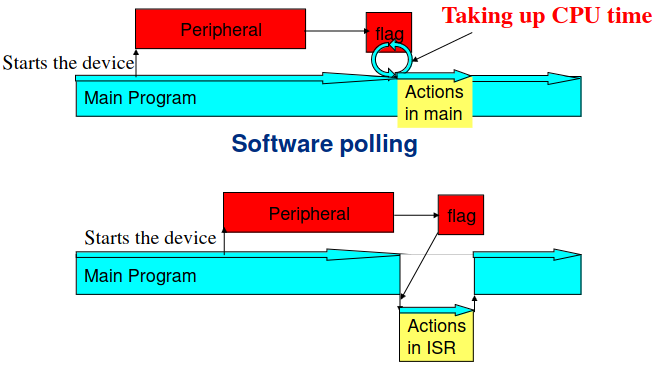
Peripherals inform the processor through external interrupt.
Where do interrupts come from
We mainly deal with the interrupts from peripherals.
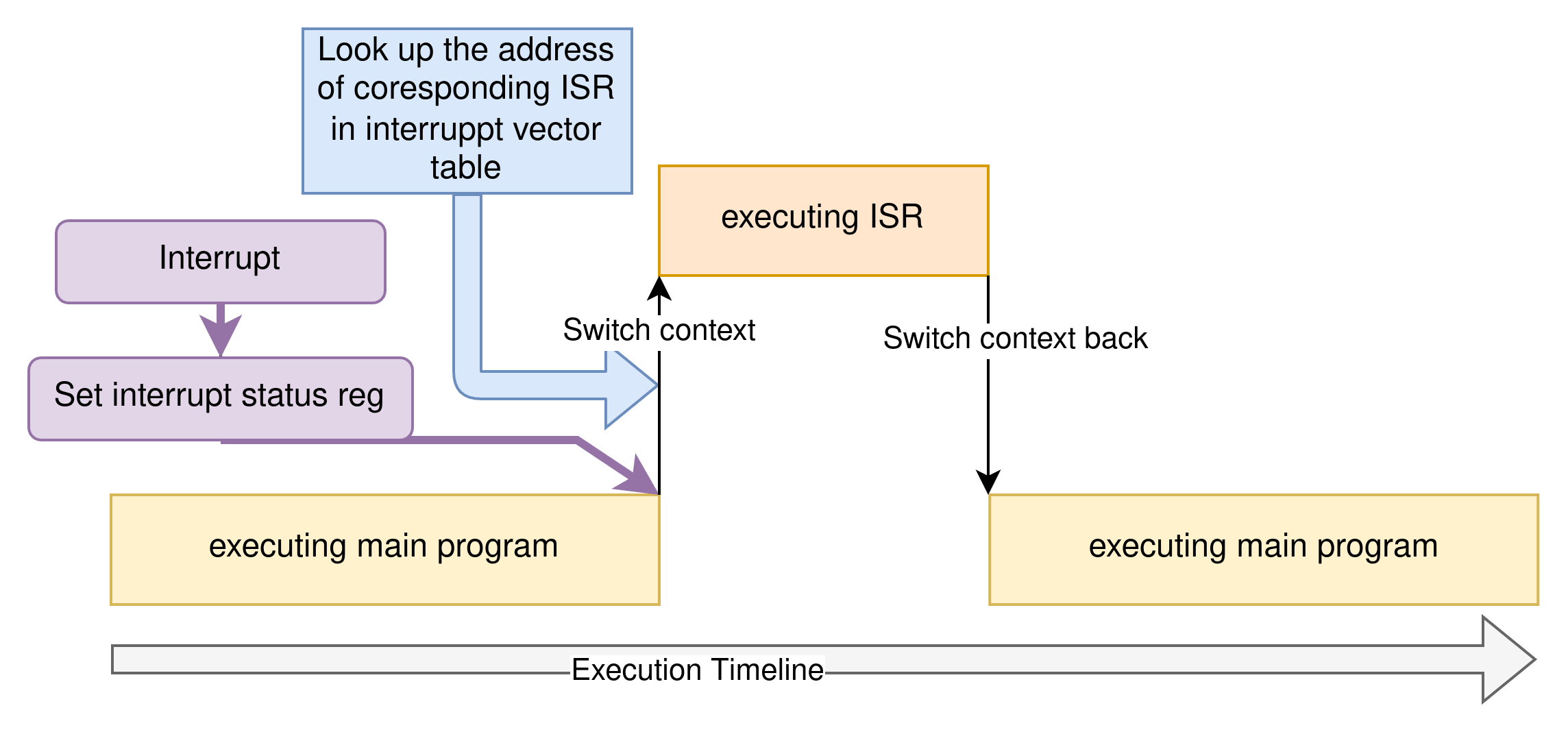
How to handle interrupts
Through interrupt service routine (ISR)
1 | | Vector Number | Interrupt Number | Description | Vector Address | |
This is an arbitrary IVT that depicts the pattern of IVT, for detailed IVT of STM32, please refer to the reference manual.
What to do inside ISR
- Always remember to clear the interrupt flag in ISR.
- Because there is often more interrupt sources than interrupt vectors, you need to judge which source triggered this interrupt based on interrupt status register.
- Customized operation… (but be short, because if the operation take too many clock cycles, it may be interrupted by another interrupt source, which may not be on purpose)
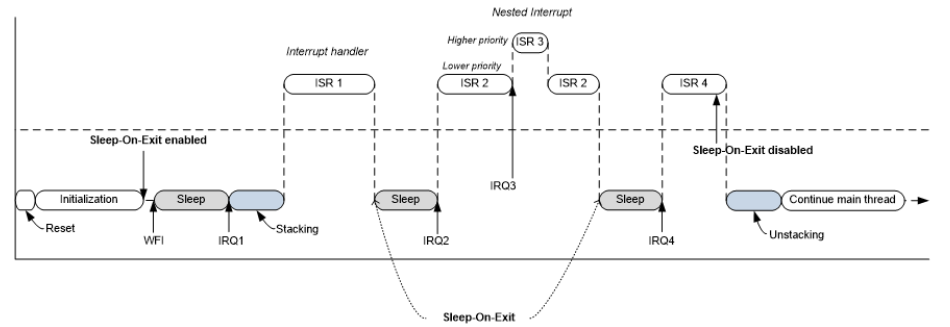
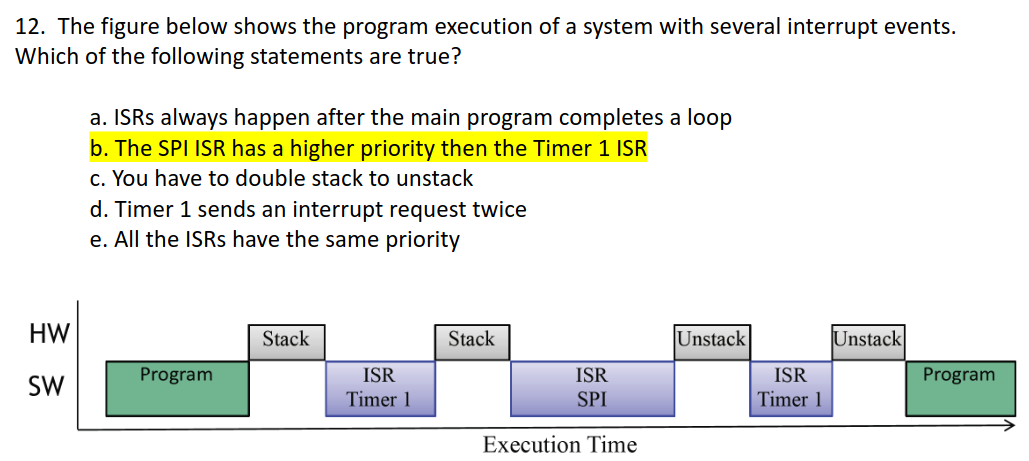
Nested interrupts
L6 (Timer)
Let’s split Timer peripheral into 3 parts:
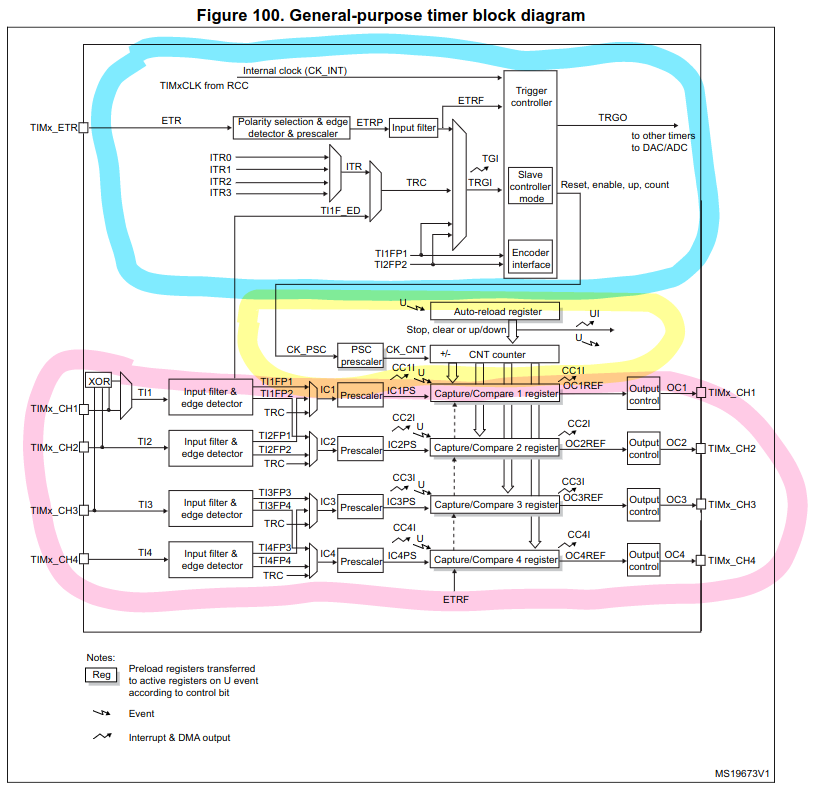
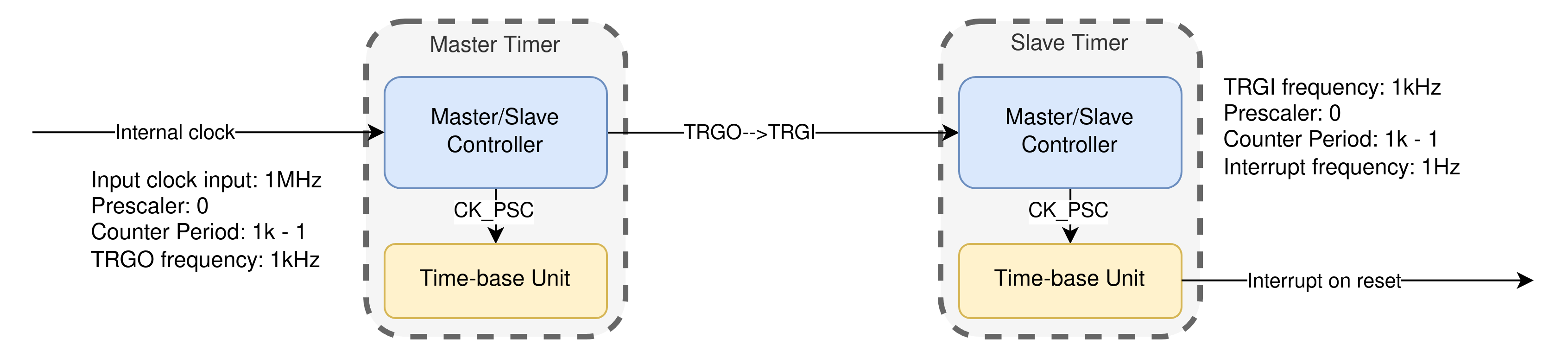
The reset frequency of the counter is $$\frac{f_{input}}{(Prescaler+1)\times(Counter Period+1)}$$
Red part: Timer-channels unit
The timer channels are the working elements of the timer.
They are the means by which a timer peripheral interacts with its external environment (through input capture or output compare).

How to use multiple timer for more counting digits (32-bit)
L7 (LCD)
Just refer to RC2_LCD. I think it’s not the focus of final exam.
L9 & L10 (Input Capture & Output Compare)
IC is a peripheral that can monitor the input signal changes (pos/neg edge) independent of the processor (Core).
OC is a peripheral that can generate precise output signal independent of the processor (Core).
In STM32, it is embedded in timer peripheral (together with output compare).
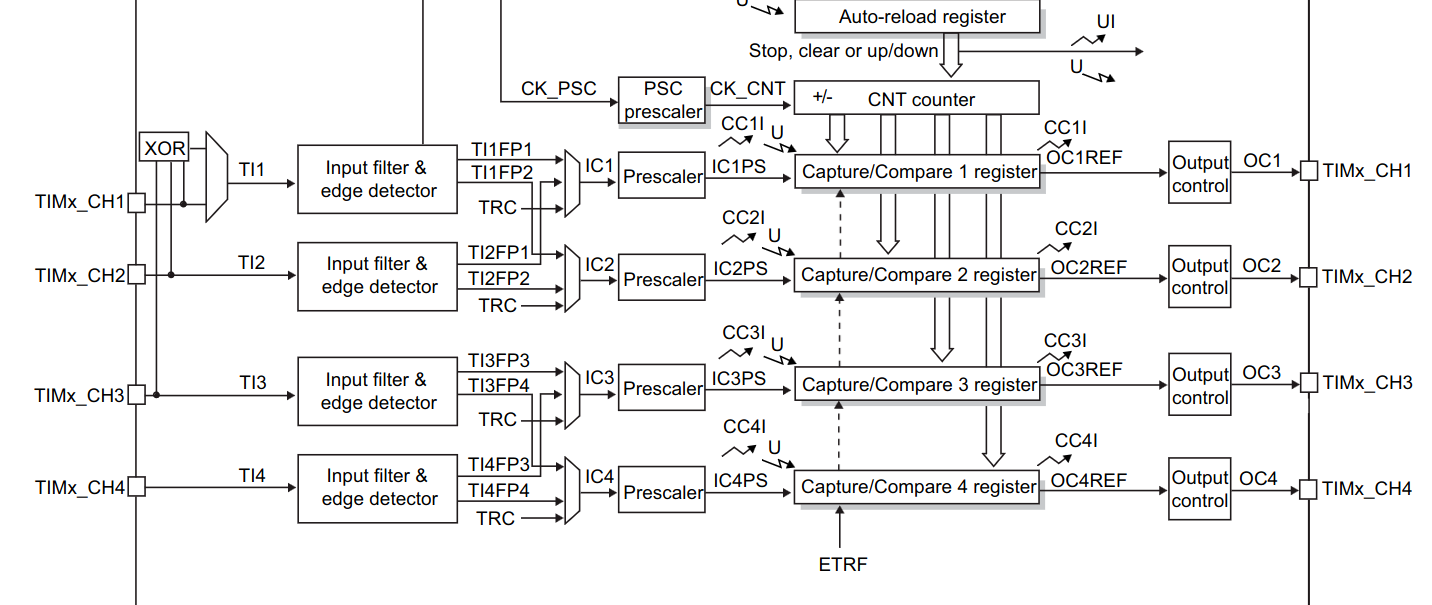
IC
You can consider IC as a timer value recorder. It will record the timer value each time the capture condition is met (you can see from the diagram, the timer value is from CNT counter).
These conditions can be:
- rising edge
- falling edge
- both
With a prescaler, we trigger capture events every few edges.
Similar for interrupt, we can trigger an interrupt every few captures.
Note:
The IC does not capture the edge immediately when a rising or falling edge happened. The capture event needs to be sync with PB_clk.
Further more, the module will capture the timer counter value that is valid 2-3 PB_clk cycles after the capture event.
For detailed configuration, please refer to Reference Manual.pdf on canvas, page 349-359, 382-385.
OC
Just refer to RC2_Output_Campare and RC3_Lab4 for the concepts and PWM configuration.
Also, the solution of hw2 has been uploaded to canvas, please take a look.
ECE3730J Final RC Part 1
http://chen-yulin.github.io/2024/08/05/[OBS]EmbededSystem-ECE3730J Final RC Part 1/